
こんにちは、Unityエンジニアのオオバです。
今日、正確には昨日、ECS完全に理解した勉強会に参加してきました。
個人的には制作モチベーションの刺激を頂いた感ある、実りある勉強会でした。
そして懇親会。お寿司がやたら美味しく感じ、おごってくれた & 場所を提供してくれたmixiさんには感謝です。
※人材募集しているらしいです。
ということで、ECSは全く関係ないですが、最近Astarアルゴリズムを勉強しようと思っていろいろ調べ、Unityで実装したという備忘録を残しておきます。
まあ、もう枯れた技術と言っても過言ではないと思いますが、実際に自分でやってみないと血肉にならない質なので、やってみます。
成果物としてはこのようなものを作りました。

クリックしたタイルにUnityちゃんが走っていくというシンプルなもの。
この経路探索にAstarを使用しています。
Astarアルゴリズムの考え方や、実装方法については、以下の記事などを参考にしました。
その他にもググればたっくさん資料が出てくるので、良い時代です。
- ゴールのノードを設定
- スタート地点から周囲のノードのコストを調べる
- より良いコストを探していく
基本的にはゴール地点にたどり着くまで3を続けるという処理になります。
面白いのが、ヒューリスティックコストと呼ばれる、推定コストの概念です。
今回の実装では、各ノードからゴールまでの直線距離を推定コストとしました(単純なので)。
ここの値を工夫することで、探索結果が大きく変わってくるため面白いです。
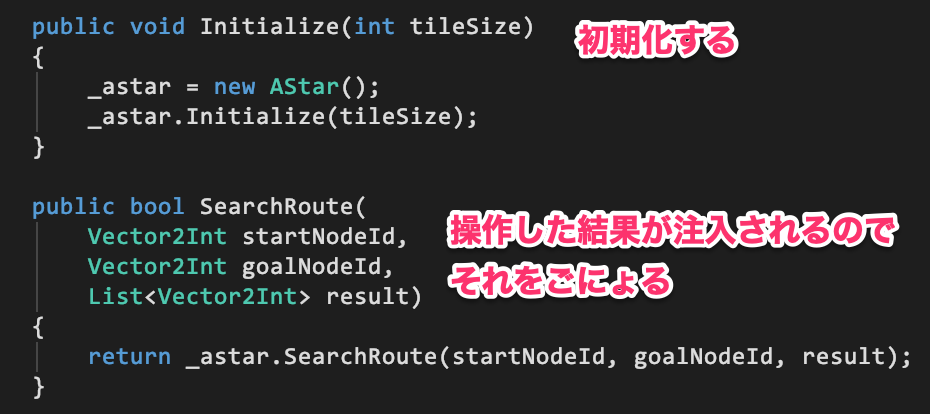
使い方としては、Astarインスタンスを初期化した後は、
- 開始ノード
- ゴールノード
- 結果注入用リスト
これらをAstarに渡せば経路の結果が帰ってくるので、それをViewに反映させるといったシンプルなAPIに仕上げています。
結果注入用リストをわざわざ代入させているのは、GC発生的な観点から、new List, ToListやToArrayをあまり使いたくないという思いがあったためです。

このように障害物(紫色のタイル)もちゃんと避けてくれます。
ちなみに、Astarだけを使いたい場合は、今回のサンプルリポジトリ のAstar.csとNode.csを引っこ抜くだけです(MITライセンス)。
最後に
今回のサンプル含めた全ソースはコチラにアップしています。
GitHub - baobao/UnityAstarSample: Astarの勉強がてらUnityでサンプル作ってみました
Astarは長い距離を操作したり、障害物が多かったりするとCPU負荷が高くなります。
この辺JobSystemでなんとかしたい感あるため、その辺調査してみようかと思っています。
この記事が気に入ったらフォローしよう






- Unity2018.2.12f1